DFG FOR 5672: The information backbone of robotized construction
Speaker of the Research Unit: Prof. André Borrmann
Funding: Deutsche Forschungsgemeinschaft (DFG), German Research Foundation
Partners: Prof. Bruckmann (Uni Duisburg-Essen), Prof. Dörfler (TU Munich), Prof. Smarsly (TU Hamburg), Prof. Hartmann (TU Berlin)
Running Period: 04/2024 - 03/2028 (Phase 1)
CMS Team Members: Maikel Brinkhoff, Mohamad Reza Kolani, Sebastian Esser, Stavrous Nousias, Tamira Wrabel
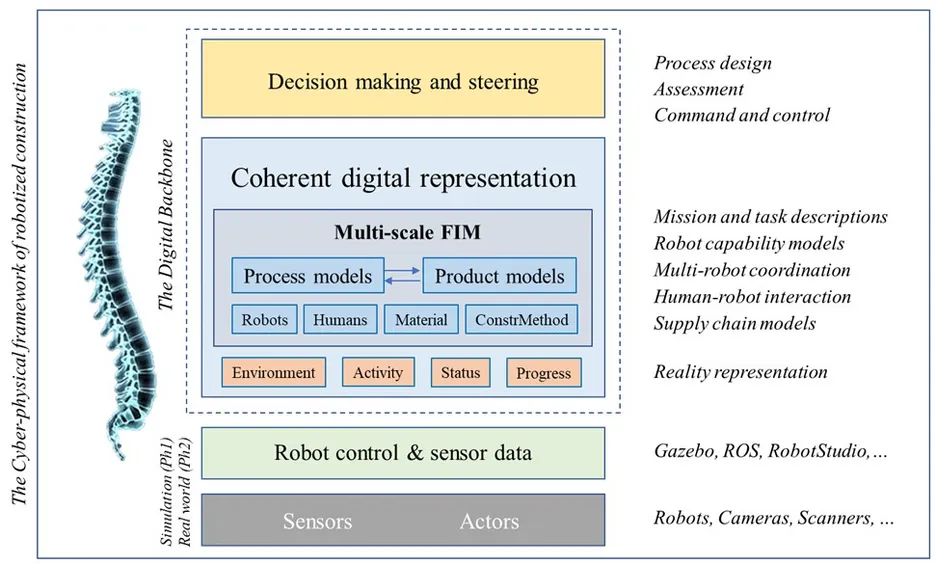
This Research Unit will lay the methodological foundations of a cyber-physical framework that allows both to plan and simulate robotic construction in virtual setups, and to deploy and control robots on real construction sites. The intended seamless transition from virtual to real will significantly speed up development cycles and practical implementations of construction robotics. Establishing such a framework requires a coordinated effort of methodological developments resulting in novel approaches that consider the specific challenges that distinguish building construction from production in other industries – the uniqueness of construction projects and the dynamic and constantly evolving nature of construction sites.
To advance beyond the state of the art, the Research Unit aims to connect two separate streams of scientific research that have significantly evolved in the past years: data-driven construction planning (BIM, construction simulation, etc.), and cyber-physical robotic production (Industry 4.0). This Research Unit sets out to develop an integrated approach in the form of a computational framework for planning and simulating robotic construction sites, with abstractions and unifications enabling the coordination of inhomogeneous robotic fleets in interaction with skilled human workers, operating together in dynamic, hard to predict, and constantly evolving construction site conditions.
To be able to cope with the complexity of robotic construction on various scales in space and time, the cyber-physical framework will inherently rely on methods for the multi-scale representation of robotic systems, to-be-built structures, and site conditions on various abstraction levels. This framework lays the conceptual and methodological foundations for developing cyber-physical systems for steering and controlling on-site robotic construction in the future.
As an integral part of the framework, the information backbone developed in this Research Unit will allow to represent all relevant data structures and data flows to allow simulation and, later, execution of the robotic site. The details of the framework’s architecture will be elaborated over the course of the Research Unit. The framework will consist of abstraction layers comprising process-oriented and product-oriented representations of construction projects, will define interfaces and data models to provide well-defined connection points for simulation models of automated construction systems, including sensing, controlling and actuation, and will allow to integrate processing chains and automation models. All subprojects will contribute to the elaboration of the framework, addressing specific aspects such as detailed modeling of robotic construction processes, multi-robot collaboration, human-robot collaboration, and logistics planning.
The Research Unit is member of the AdvanceAEC research network.