SOLID - Smart Soil Compaction Devices
„SOLID – Smart Soil Compaction Devices“
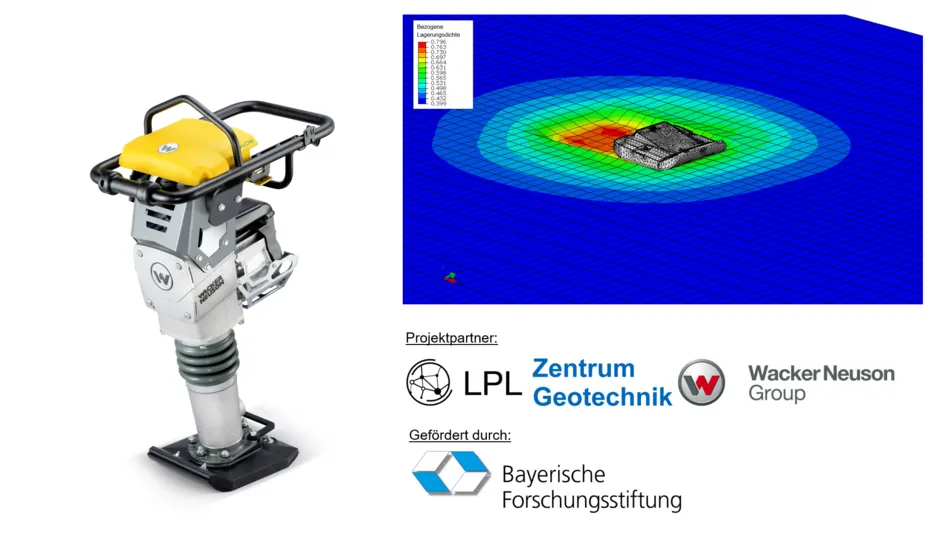
Vibrationsstampfer sind handgesteuerte Bodenverdichtungsgeräte, welche eingesetzt werden um den Boden auf engem Raum zu verdichten. Aufgrund der Vibrationen kann sich die Bedienung von diesen Geräten auf das Wohlbefinden der Mitarbeiter auswirken und bei längerer Exposition arbeitsbedingte Erkrankungen hervorrufen. Das Projekt SOLID zielt darauf ab, eine neue Generation von Vibrationsstampfern zu entwickeln, die durch die Nutzung von Simulationsmodellen optimiert werden. Von entscheidender Bedeutung ist dabei die Gesundheit der Mitarbeiter kombiniert mit einer effizienten und nachhaltigen Bodenverdichtung.
Die Integration von Assistenzfunktionen ermöglicht eine Echtzeit-Datenanalyse, die ein unmittelbares Feedback zu kritischen Prozessparametern liefert. Insgesamt verbessert dies die Effizienz des Stampfers, den Arbeitsablauf sowie die Ergebnisqualität.
Hierfür wird ein Digitaler Zwilling bestehend aus einem Mehrkörpermodell des Stampfers, einem numerischen Modell des Bodens sowie eines numerischen Modells der Boden-Stampfer-Interaktion aufgebaut. Um im Anschluss der numerischen Simulationen eine Plausibilisierung und Validierung der Ergebnisse durchführen zu können, ist ein umfassendes Bodenuntersuchungsprogramm bestehend aus Labor- und Feldversuchen notwendig. Hierfür werden sowohl statische als auch zyklische Versuche mit unterschiedlichen Anfangsspannungszuständen und Lagerungsdichten durchgeführt, um das Spannungs-/Dehnungsverhalten des Bodens bei dynamischer Verdichtung zu ermitteln.
Die validierten Modelle dienen als Ausgangspunkt für eine anschließende Lösungsraumanalyse um die Entwicklungseffizienz zu verbessern und die Systemkomplexität zu verringern. Mithilfe der Lösungsraumanalyse und der Simulationsmodelle sollen der Stampfer und der Stampfprozess bzgl. Bodenverdichtung und Hand-Arm-Vibrationen (HAV) optimiert werden.
Der digitale Zwilling des Stampfers inklusive des Bodens stellt dabei die Grundlage für die Entwicklung einer smarten Gerätesteuerung dar, bei der die gemessene Bewegung des Stampfers Rückschlüsse auf die bereits erreichte Bodenverdichtung und eine automatische Anpassung des Verdichtungsvorganges unter besonderer Betrachtung der zulässigen HAV ermöglicht.
Ansprechpartner
bei
Technische Universität München
Zentrum Geotechnik
Franz-Langinger-Straße 10
81245 München
Projektpartner
Technische Universität München (TUM-LPL)
Lehrstuhl für Produktentwicklung und Leichtbau
Boltzmannstr. 15
85748 Garching
https://www.mec.ed.tum.de/lpl/startseite/
Technische Universität München (TUM-ZG)
Lehrstuhl und Prüfamt für Grundbau, Bodenmechanik, Felsmechanik und Tunnelbau
Franz-Langinger-Str. 10
81245 München
https://www.cee.ed.tum.de/gbft/startseite/
Wacker Neuson Produktion GmbH & Co. KG
Wackerstraße 6
85084 Reichertshofen
Bayerische Forschungsstiftung AZ-1571-22